
About Me
Hey there! Thanks for visiting my online portfolio! I'm Daniel, a Mechatronics student studying at the University of Waterloo. I enjoy learning and applying different technologies to create projects that can help tackle real-world issues.
Projects

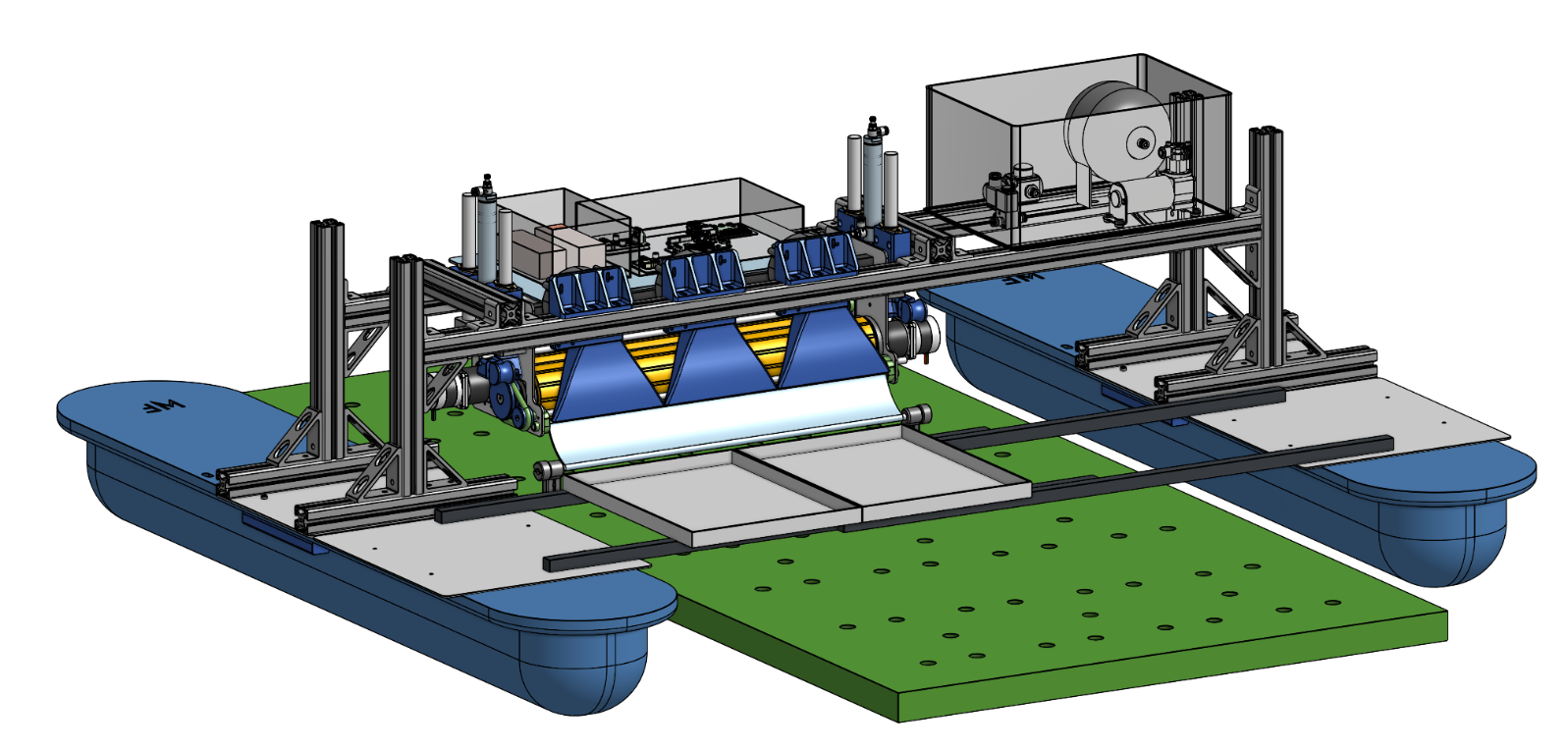
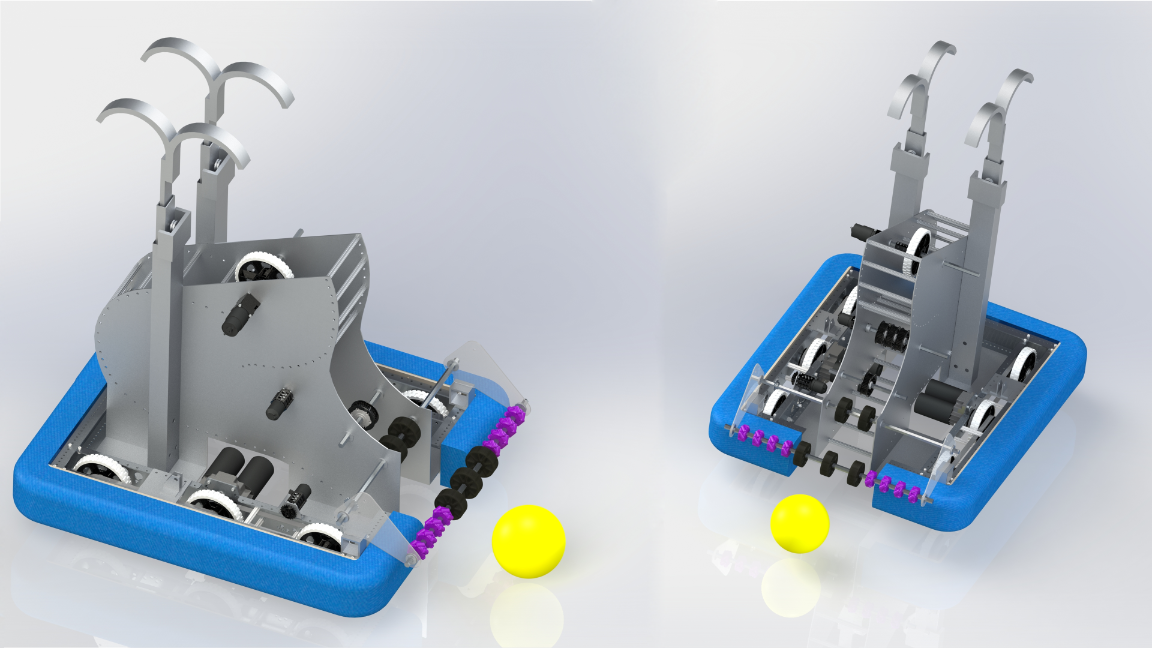
Salico Harvester Robot
C, RTOS, Motor Controls, Sensing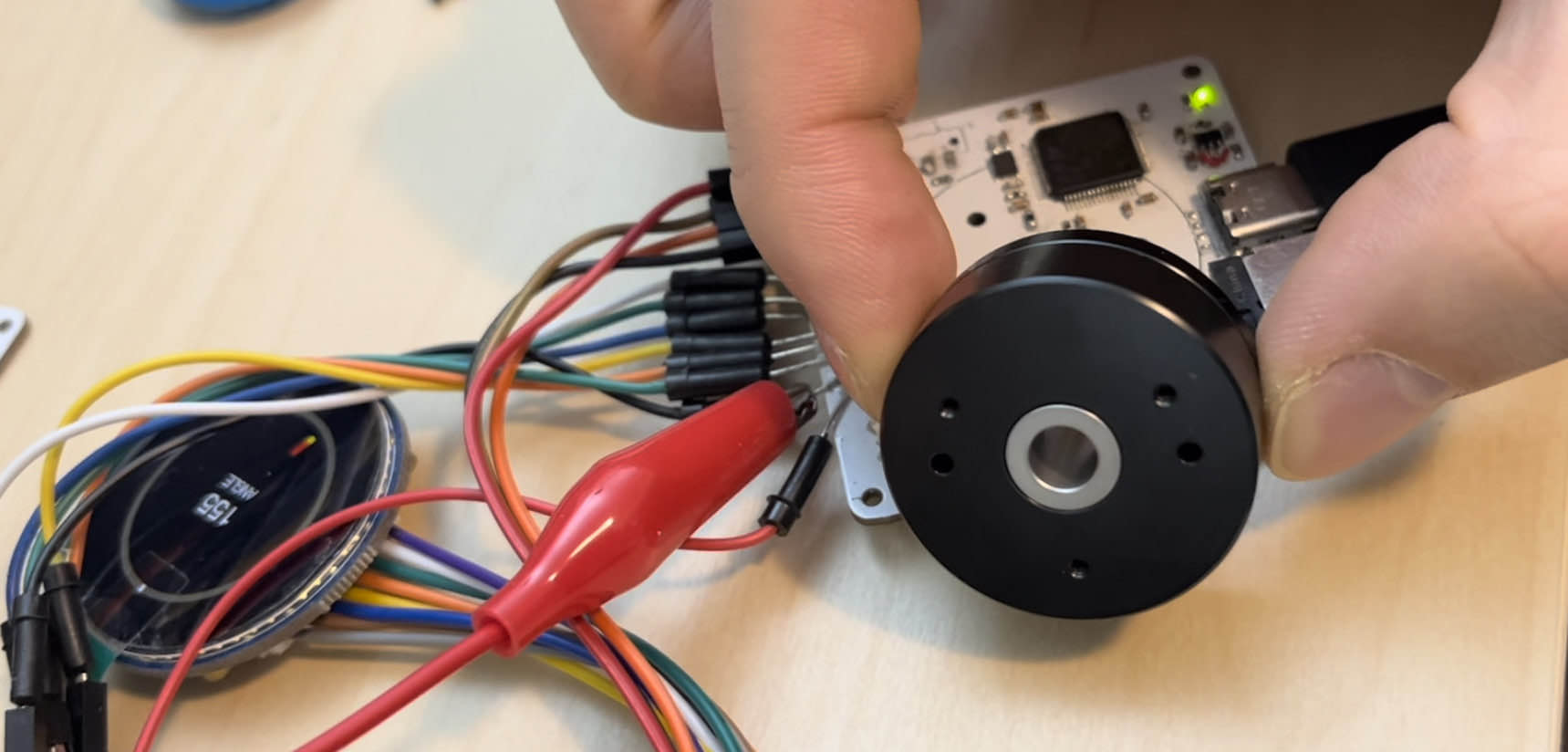
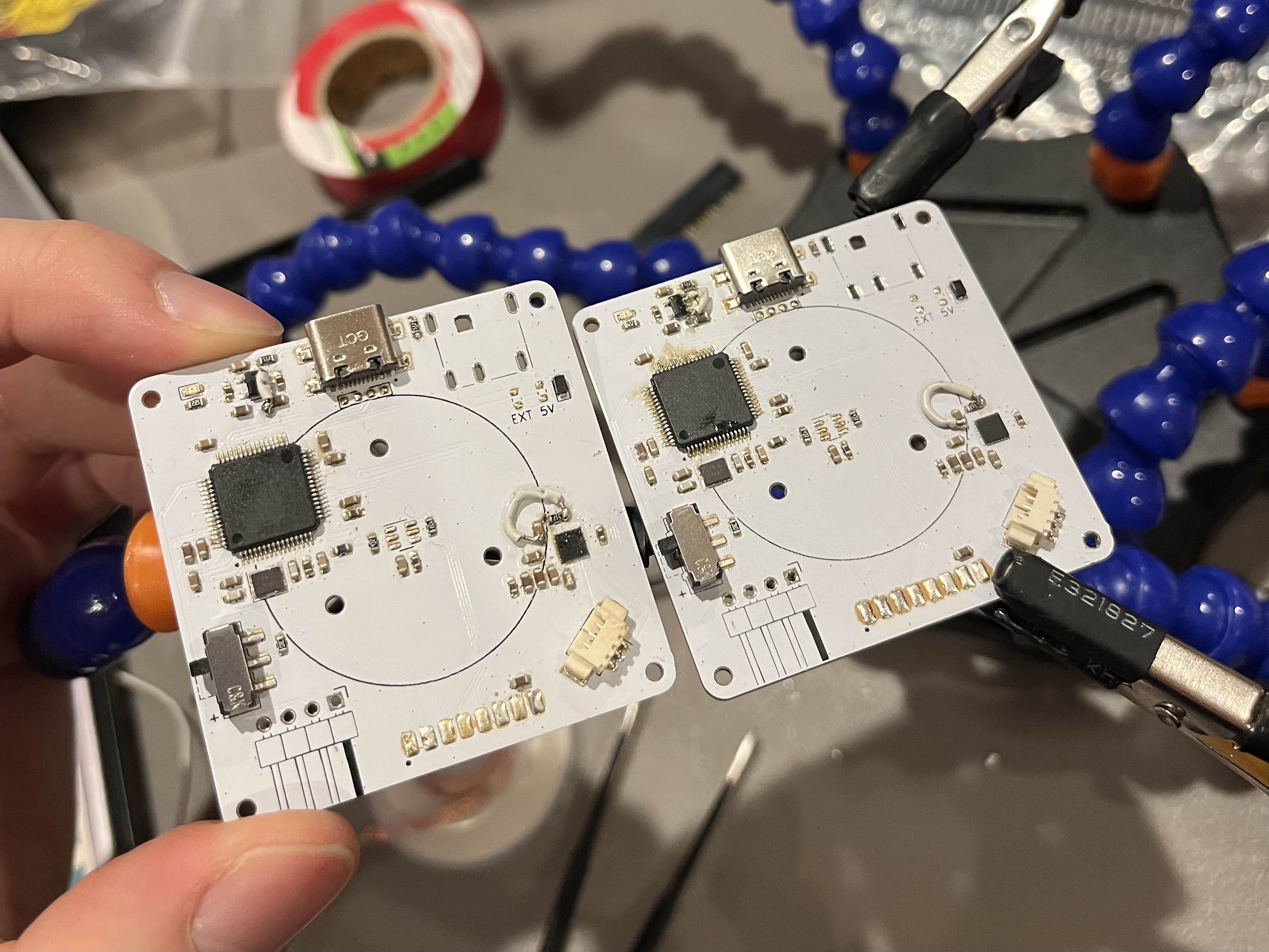
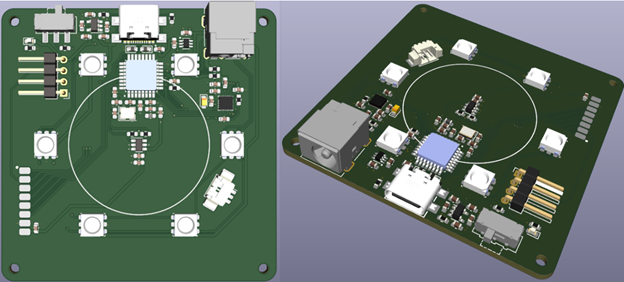
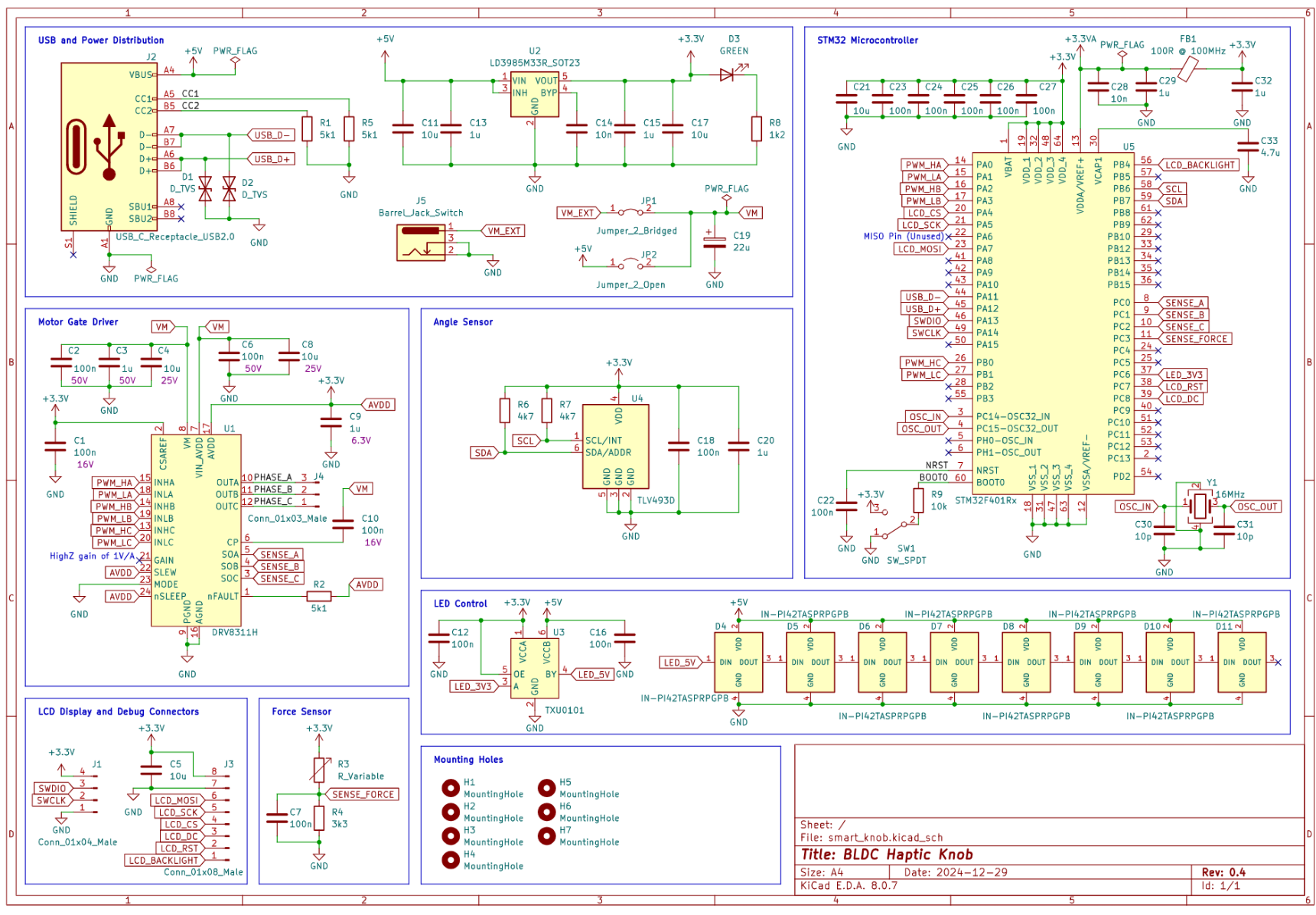
Haptic Knob
C, RTOS, PID Control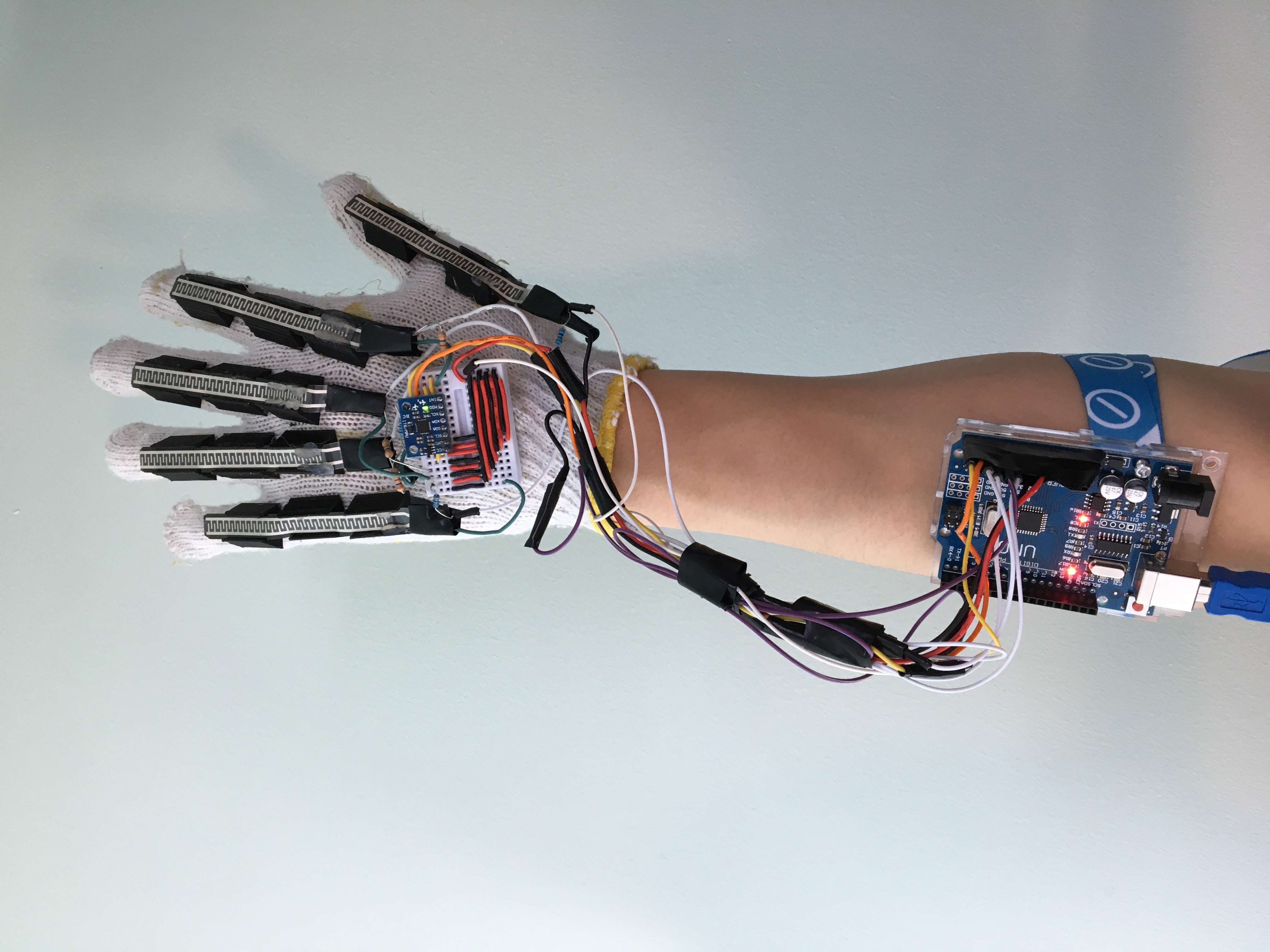



Gesture-Recognition Glove
Python, TensorFlow, Arduino, C/C++

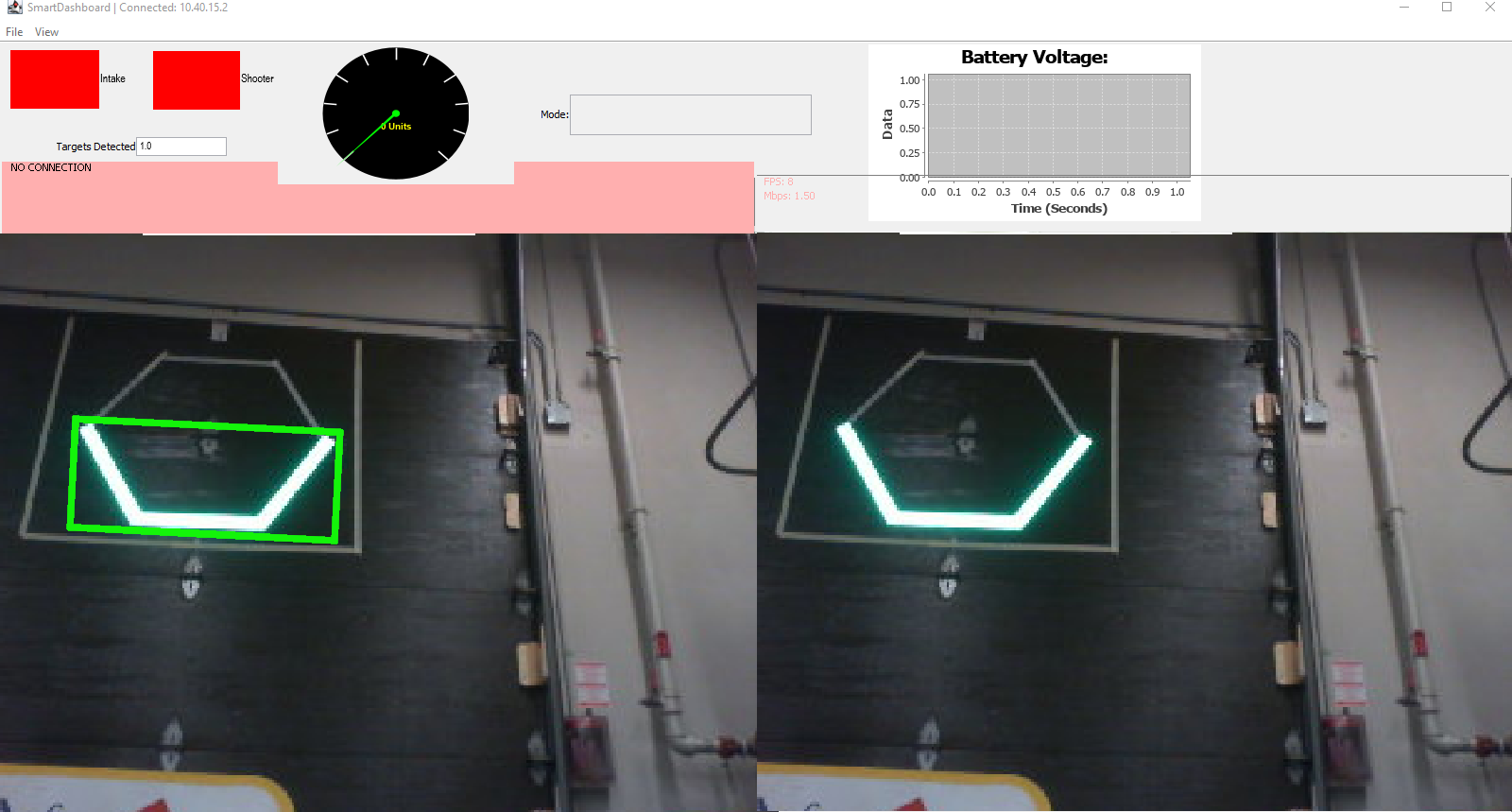

FIRST Robotics Team 4015
Java, Vision Processing, SolidEdge Modeling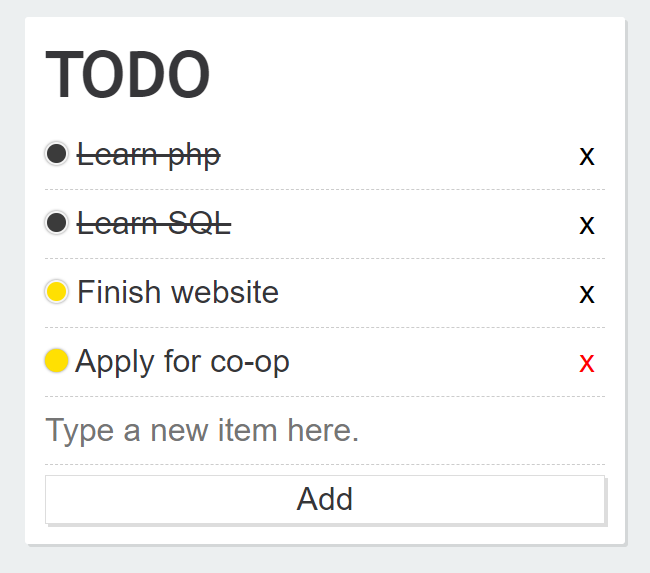

To-do list database
HTML, CSS, PHP, MySQL
Face the Police
Python, OpenCV, API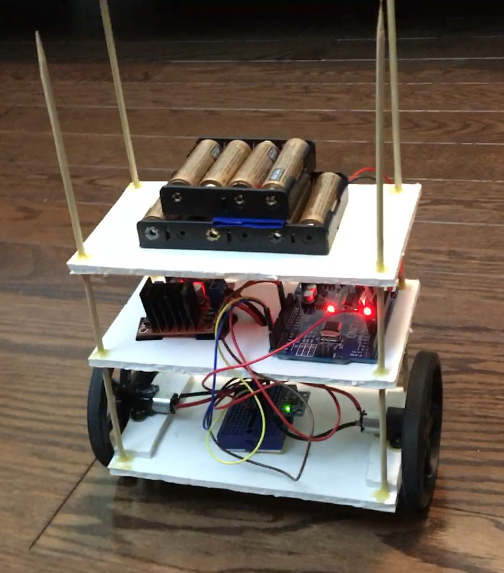
Self-Balancing Robot
C/C++, Arduino, MPU6050, PID Control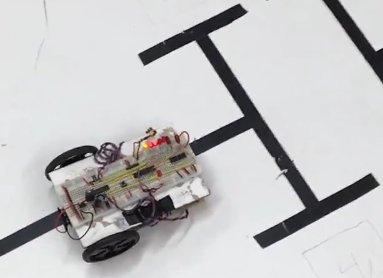
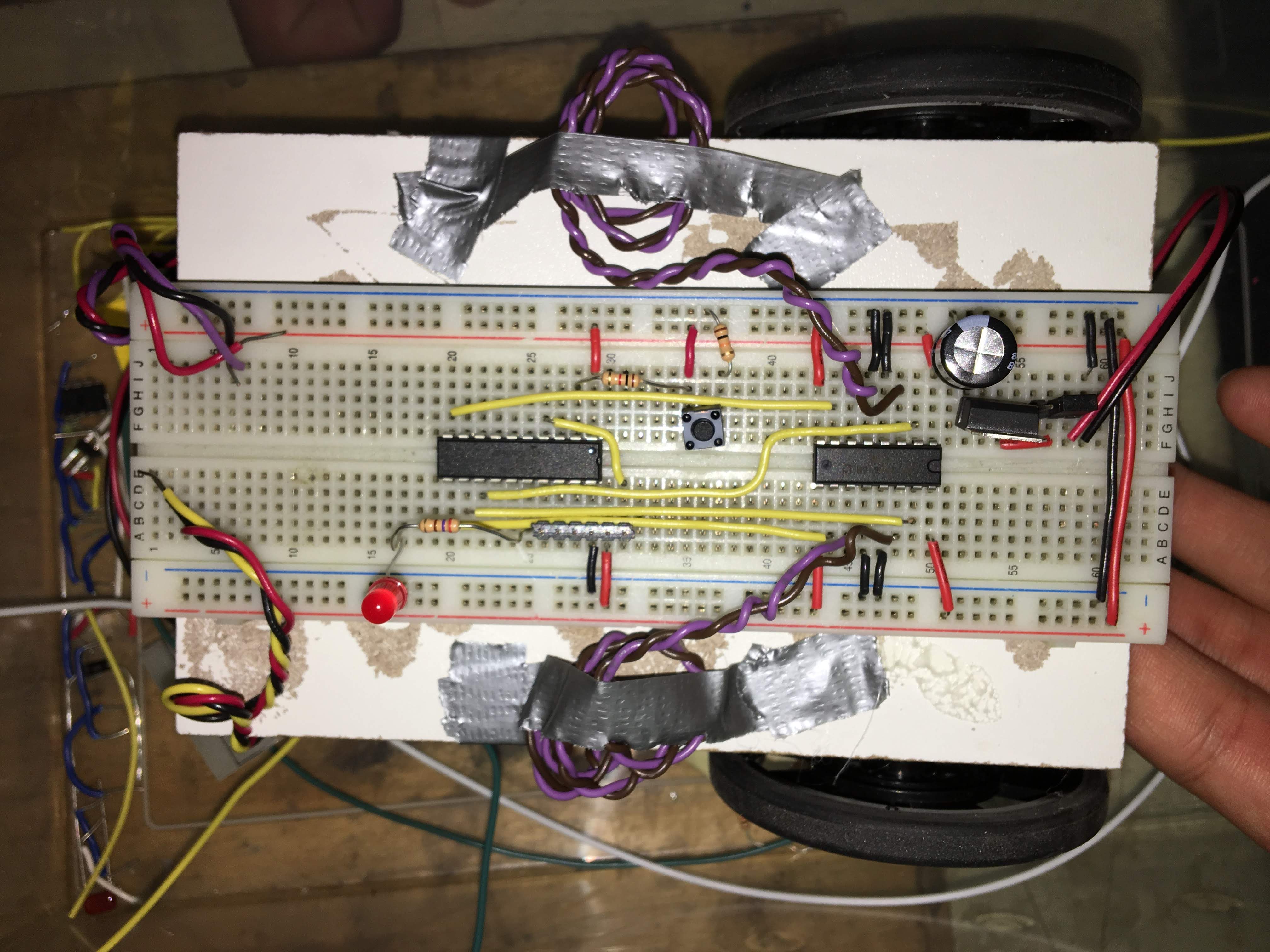
Line Following Robot
C, Integrated Circuits (PICkit 2), IR Sensor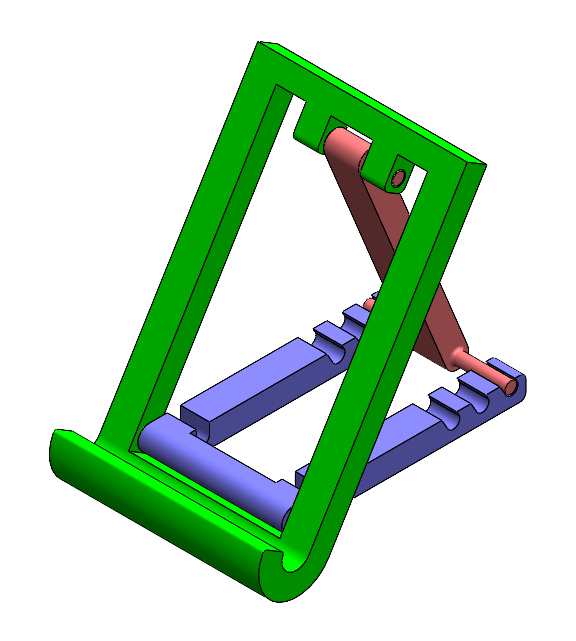
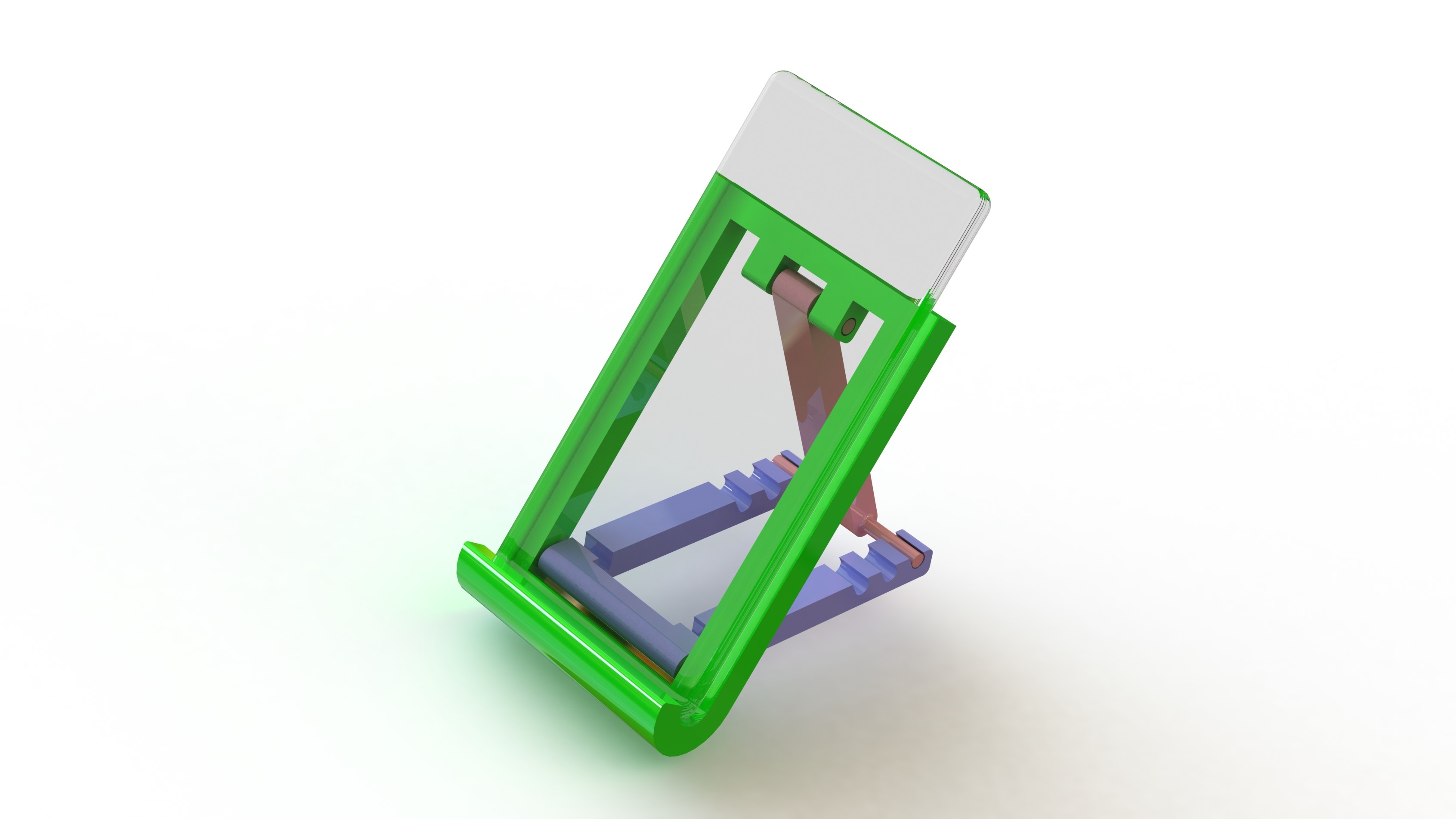
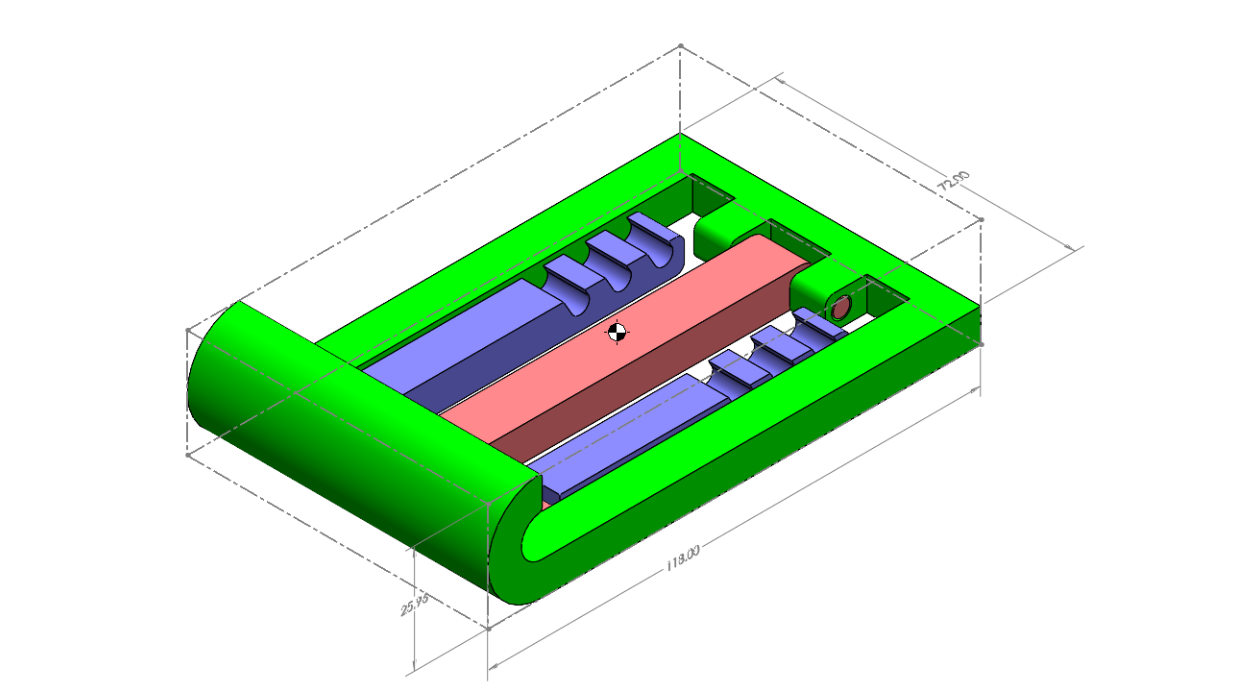
Phone Stand
SolidWorks Modeling and DimensioningContact Me
Get in touch, I'd love to hear from you!
 Email me at danielye4@gmail.com
Email me at danielye4@gmail.com
 Follow me on GitHub
Follow me on GitHub
 Follow me on Devpost
Follow me on Devpost
 Connect on LinkedIn
Connect on LinkedIn